Waste Managment System
As a member of my school’s Environmental Council, I often helped sort recyclables after school events. The recycling bins were always full of the wrong materials—plastic bags, leftover food, even batteries. It was frustrating to see how much waste ended up contaminated simply because sorting was inconvenient or confusing. That experience sparked a question I couldn’t ignore: what if we could automate this process entirely?
I began designing a concept for an Automatic Waste Segregation System that could identify and sort materials without human intervention. The goal was to create a system that reduced contamination, improved recycling accuracy, and minimized manual labor in waste management.
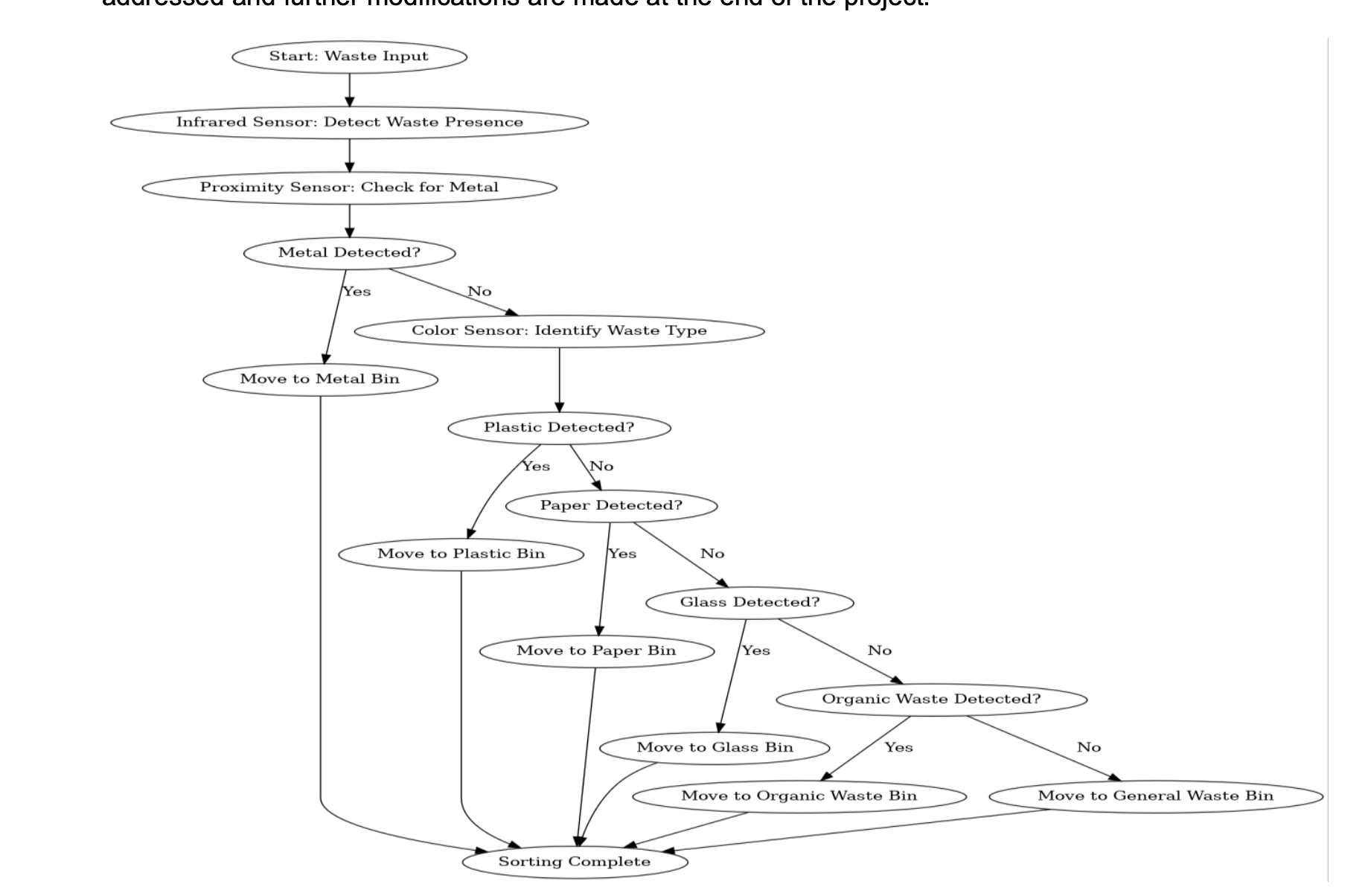
I started by researching how different materials could be detected through their physical and optical properties. The system’s design used a combination of infrared sensors, color sensors, and metal detectors to classify objects into distinct categories. Each item passing through the chute was scanned for reflectivity, conductivity, and color, and then automatically sorted using servo-controlled mechanical arms and NEMA-14 stepper motors.
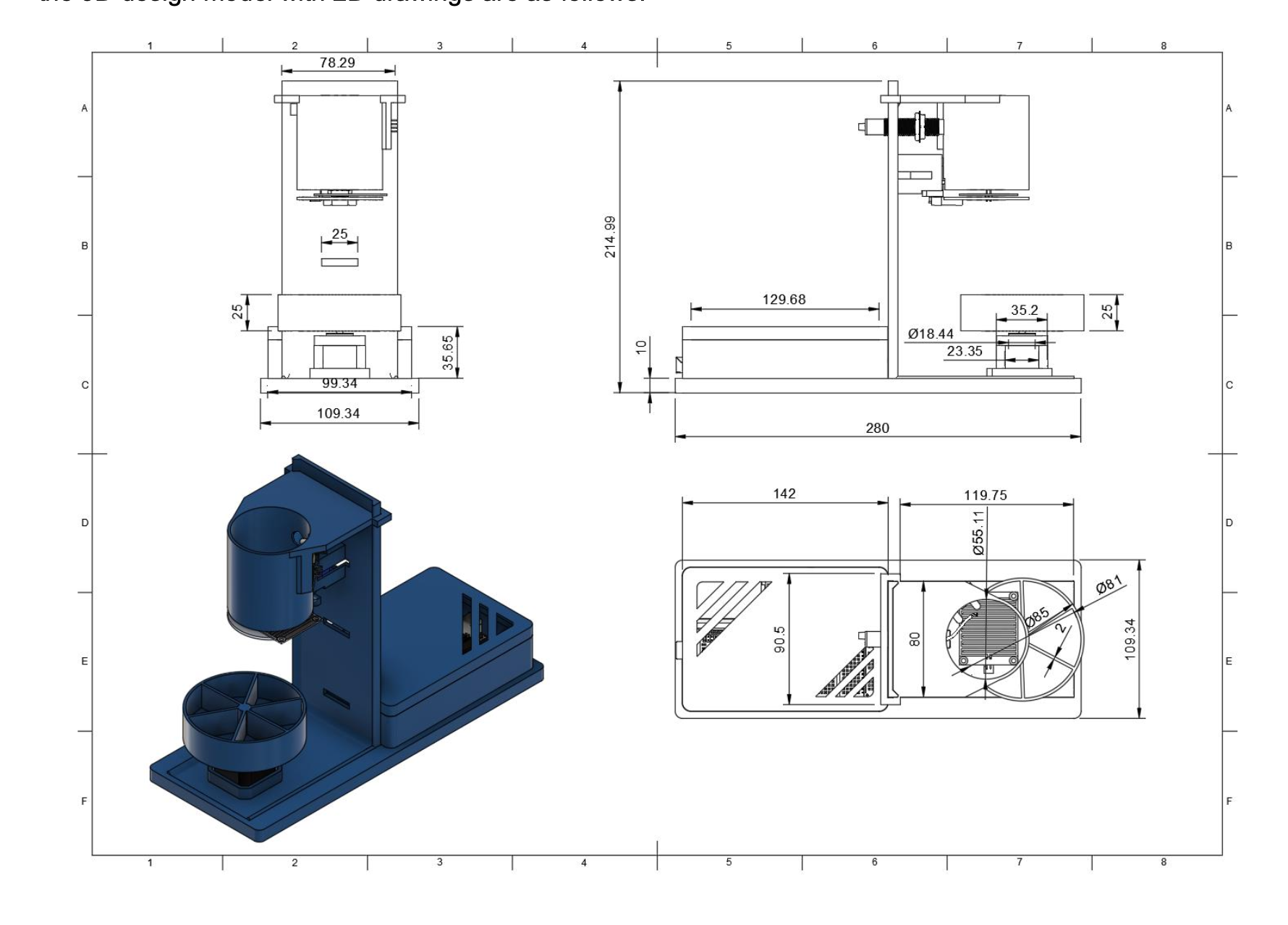
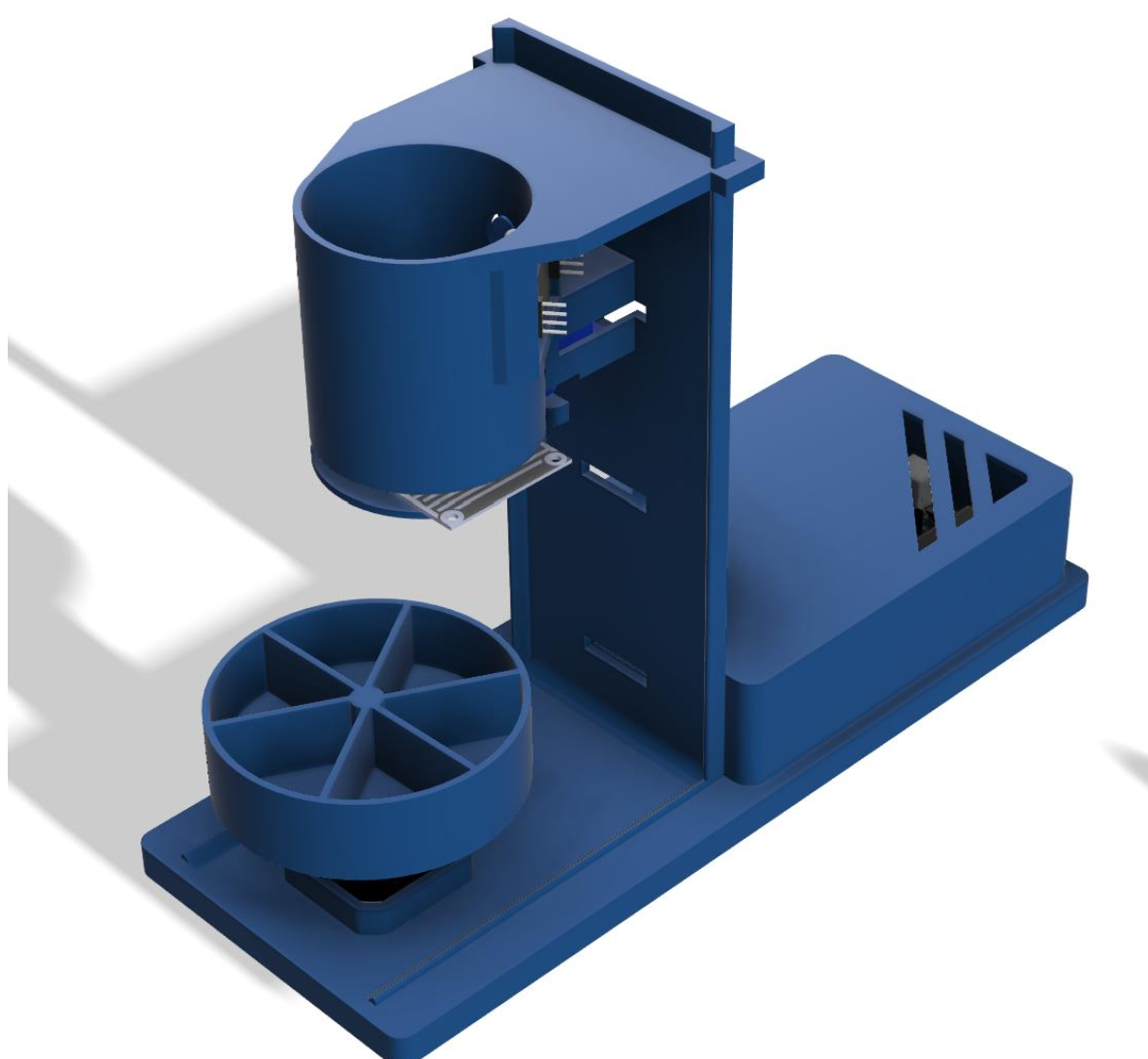
The core of the system was an Arduino Uno microcontroller, which processed sensor data and executed sorting commands in real time. I implemented the control logic using PWM and I2C communication protocols, along with a PC817 optocoupler to protect the circuits from high-voltage fluctuations. To bring precision to the physical design, I modeled and assembled the prototype using SolidWorks and 3D printing, ensuring accurate alignment between sensors and actuators.
Testing confirmed that the system could reliably distinguish between metallic, plastic, and organic waste, significantly improving sorting accuracy. Beyond the hardware, I designed the concept for scalability, envisioning future versions with AI-enhanced classification and IoT connectivity for smart waste collection systems.
What began as a tedious cleanup duty turned into an engineering challenge with real environmental impact. By transforming frustration into innovation, I learned that sustainability depends not only on awareness but on systems that make the right choice the easy one. This project deepened my interest in environmental automation, showing how robotics and embedded systems can make everyday sustainability both efficient and practical.